The 47th Annual Frontiers in Education (FIE) Conference
Design of a MATLAB-based Teaching Tool in Introductory Fractional-Order Systems and Controls
Aleksei Tepljakov$^{\dagger}$, Eduard Petlenkov$^{\dagger}$, Emmanuel A. Gonzalez$^{\ddagger}$, Ivo Petras$^{\star}$
$^{\dagger}$Department of Computer Systems, Tallinn University of Technology, Tallinn, Estonia
$^{\ddagger}$Association of Philippine Volunteer Fire Brigades, Inc., Malate Manila, Philippines
$^{\star}$BERG Faculty, Technical University of Kosice, Kosice, Slovak Republic
About the Project
This project is a joint effort between researchers from Slovak Republic, USA (formerly from Philippines), and...
Estonia

Tallinn University of Technology

About the Presenter: Dr. Aleksei Tepljakov
- Research Scientist at the Control Systems Research Laboratory, Centre for Intelligent Systems, Department of Computer Systems, Tallinn University of Technology
- Head of Re:creation Virtual and Augmented Reality Laboratory
- E-mail: aleksei.tepljakov@ttu.ee, work phone (+372) 620 2116
- Research interests: Fractional-order Calculus in Modeling and Control, Nonlinear Systems, Embedded Systems, Virtual Reality and its applications in Education and Industry
Talk outline
- Motivation and problem statement
- Basics of fractional calculus in modeling and control
- Methodology: Previous results and concept inventory
- Work-in-Progress contribution: FO controller tuning
- Example workflow
- Conclusions
Motivation and problem statement
- Fractional-order calculus (FOC), where the orders of differentiation or integration are allowed to be real numbers, has been the object of discussion and development for more than 300 years.
- However, there is still no general intuitive explanation for the meaning of a noninteger derivative similar to that of its classical counterpart.
- FOC has not been a part of standard mathematics curriculum at large due to some of these theoretical issues.
- However, applying FOC in various scientific fields, including automatic control systems, leads to considerable benefits in terms of modeling accuracy and additional flexibility in control design.
Motivation and problem statement
Thus, we would like to attempt to rectify the situation with FOC in university education by developing a set of tools that allow to gain an insight into the mechanics and benefits of FOC in modeling and control of dynamic systems.
The present work-in-progress contribution focuses on basic simulation and control design aspects using MathWorks® MATLAB/Simulink software.
Fractional-order Calculus in Modeling
The main idea of fractional-order calculus is the generalization of integration and differentiation to a non-integer order operator $_{a}\mathscr{D}{}_{t}^{\alpha},$ where $a$ and $t$ denote the limits of the operation and $\alpha$ denotes the fractional order such that
where generally it is assumed that $\alpha\in\mathbb{R}$, however the order can also be a complex number.
Fractional-order Calculus in Modeling
Based on that definition, fractional-order differential equations (FODEs) can be constructed as follows:
where $(a_{i},b_{j})\in\mathbb{R}^{2}$ and $(\alpha_{i},\beta_{j})\in\mathbb{R}_{+}^{2}$. The corresponding fractional-order transfer function representation of a process model with an input delay term is
where it is usual to take $\beta_{0}=\alpha_{0}=0$ so that the static gain of the system is given by $K=b_{0}/a_{0}$, and $L\in\mathbb{R}_{+}$.
Fractional-order Calculus in Control
We consider the typical negative unity feedback control loop:
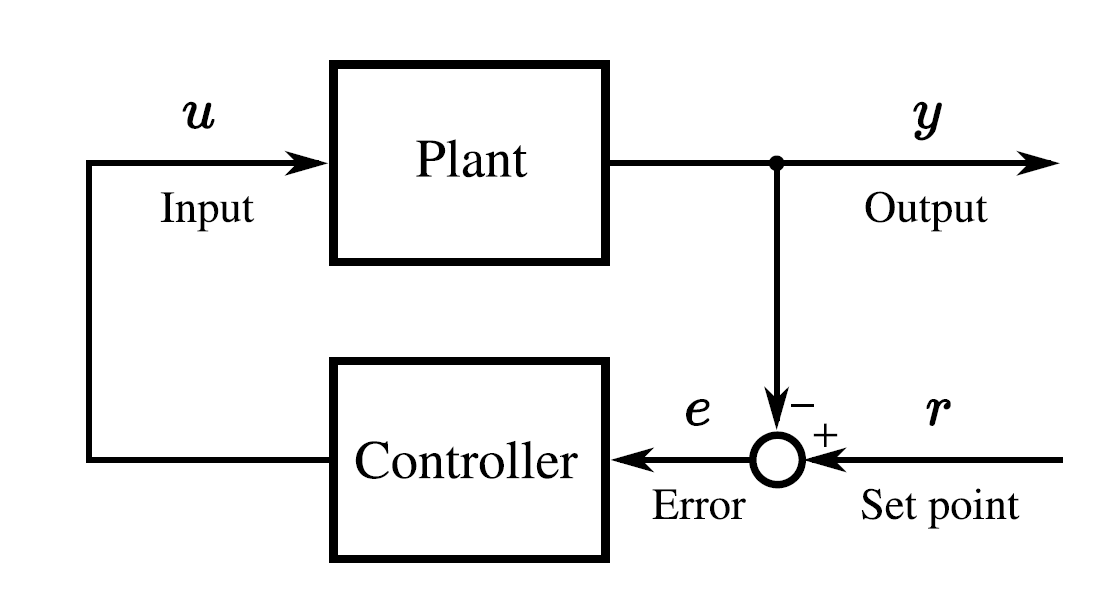
The controller is a fractional-order PID controller in the form
where $\lambda$ and $\mu$ are orders of integration and differentiation, respectively.
Benefits of Fractional-order Control Actions

Above: the responses of basic fractional integrator and differentiator components $s^{\gamma}$ to square and trapezoidal signals, respectively.
How to measure control performance?

Previous Results
The following discussion is based on the analysis of several years of teaching experience related to advanced control courses read in Tallinn University of Technology and Technical University of Kosice.
One particular learning objective is to teach model based control design in the context of FO modeling and has the following components:
- Illustration of the specifics of fractional-order systems and controllers through time- and frequency domain simulations and analysis of the obtained results.
- Identification of a fractional-order dynamic system and assessment of the quality of the obtained model.
- Design of a suitable FOPID controller of the obtained model and assessment of its performance on a simulated close-to-real-life plant.
Previous Results
Shown below is student grade distribution in the courses in Tallinn University of Technology (TUT) and Technical University of Kosice (TUKE) for the 2016–2017 academic year. On average, 39 students participate in the courses.

The increase in results of TUT students is seen as correlated with FOMCON toolbox usage for solving practical tasks. The later offers a plethora of graphical user interfaces to facilitate work with FO models and controllers.
Proposed Concept Inventory
- Specifics of fractional-order dynamics: strong dependence on memory; self-similarity; slow convergence;
- Specifics of FOPID controller compared to conventional PID controller; understanding of fractional control actions;
- Frequency domain specifications, stability, and robustness in case of fractional-order systems;
- The dependence of frequency domain characteristics on the orders of integration/differentiation and the relation of these characteristics with the time domain response;
- Tuning FOPID controllers via linear approximations of nonlinear plants; using linear FOPID controllers for control of nonlinear systems.
Designed FOMCON-based GUI: BODEFOPID

Example workflow
Let the plant to be controlled be described by a simple integer-order model
where $K\in[0.8,1.2]$ with a nominal value of $1$. The task is to design a suitable controller for it. One possible workflow using the BODEFOPID tool is as follows:
- Set the plant parameters, simulate open loop response.
- Start by adding an integral component $K_{i}=0.5$. Simulate closed loop response.
- Using the $\lambda$-slider, decrease the value of the order of integration. The results are updated automatically.
Example result

Conclusions
- In the present paper, we have outlined a particular problem related to the learning objective of an advanced control course having to do with fractional-order modeling and control.
- The previous treatment of the problem was described, and a work-in-progress tool adhering to a certain concept inventory was proposed along with a relevant usage example.
- Future work will be focused on integrating this tool into the course and formal analysis of the results of this integration.
Acknowledgements
This article is based upon work from COST Action CA15225 (a network supported by COST, European Cooperation in Science and Technology).
Acknowledgements

This work was partially supported by IT Academy through a mobility scholarship.
Please learn more about the program on the official website: http://studyitin.ee/